8. Technical Specifications
| Lite6 | |
|---|---|
| Robot Type | Lite6 |
| Cartesian Range | X: ±440mm; Y: ±440mm; Z: -165~683.5mm; Roll/Pitch/Yaw: ±180° |
| Weight(robotic only) | 8KG |
| Maximum Payload | 600g |
| Maximum Joint Speed | 180°/s |
| Maximum Speed of End-Effector | 500mm/s |
| Repeatability | ±0.5mm |
| Ambient Temperature Range | 0-50℃ |
| Power Consumption | Typical 150W, 300W Power is recommended. |
| Input Power Supply | 24V DC, 14.66A |
| ISO Class Cleanroom | 5 |
| Mounting Way | Any Direction |
| Materials | Aluminium, Carbon Fiber |
| Footprint | 130×140 mm |
| End Flange | DIN ISO 9409-1-A50/63(M5*6) |
| Robotic Arm Communication Protocol | Private TCP(custom) |
| End Effector Communication Protocol | Modbus RTU |
| Programming | UFACTORY Studio, Python/C++/ROS |
| Joint Rotation Direction | 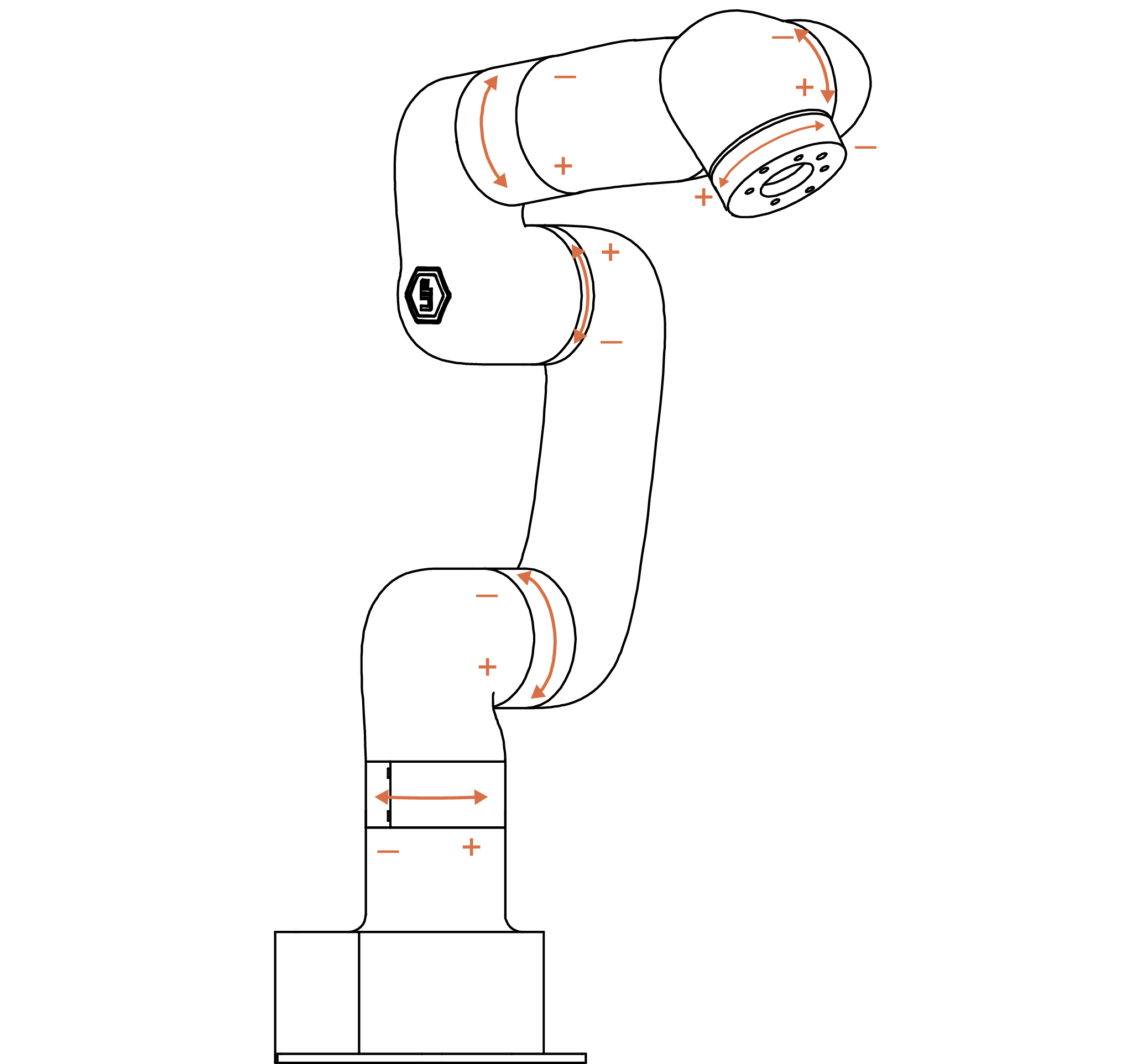 |